
搜索结果: 1-15 共查到“控制科学与技术 Internet”相关记录16条 . 查询时间(0.062 秒)
2018年SPIE自主系统会议(SPIE Autonomous Systems: Sensors, Vehicles, Security and the Internet of Everything)
2018年 SPIE 自主系统 会议
2017/11/27
Advances in on-board navigation, vehicle sensors, artificial intelligence, image processing, wireless communications, and advanced servo controls are rapidly transforming transportation systems. Autom...
2017年物联网自主机器人的高级学习技术专题会议(Advanced Learning Techniques for Autonomous Robots in the Internet of Things )
2017年 物联网 自主机器人 高级学习技术 专题会议
2017/4/1
In the past twenty years, Machine Learning (ML) has enabled a number of key technologies that have revolutionized many aspects of our daily lives. Notable examples include spam filtering, automated fr...
2017服务互联网自动控制性能和可靠性的权衡国际研讨会(International Workshop on Autonomous Control for Performance and Reliability Trade-offs in Internet of Services)
2017 服务互联网 自动控制性能 可靠性 权衡 国际研讨会
2017/2/15
The paradigm shift from an information-oriented Internet into an Internet of Services (IoS) has opened up virtually unbounded possibilities for creating and deploying new services. In this reshaped IC...
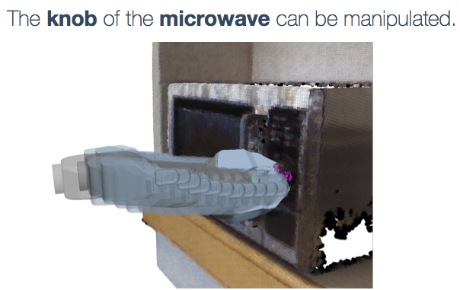
To serve as helpers in our homes, offices and factories, robots will need to understand how the world works and how the humans around them behave. Robotics researchers have been teaching them these th...
结合操作者意图分析的Internet机器人控制方法研究
网络遥操作 基于事件 动态神经元群
2009/9/30
互联网传输过程中存在的随机时延,影响了操作者与遥操作机器人之间的实时交互,降低了系统稳定性和操作性能。论文提出一种新的方法,利用动态神经元群模型对操作者发送的控制指令序列进行分析,实现对操作者意图的推断。在随机时延条件下,遥操作机器人能够根据操作者意图和当前环境信息,通过局部自主控制完成期望任务动作。同时可以与主端操作者基于事件的控制指令进行切换,来保证系统的稳定性,提高整个控制系统的操作性能和效...
基于internet的风机远程监测与诊断系统
风机 远程监测 诊断系统
2008/12/26
介绍了一种风机远程监测和诊断系统。该系统采用B/S模式并结合CORBA及SOAP /Web Service技术,较好地解决了实时数据的动态显示和负载均衡等问题。经过运行实践证明,该系统能对现场设备的运行状态及时作出判断,具有较高的可靠性与稳定性。
基于Internet的多机器人遥操作系统
Internet 多机器人 遥操作系统
2008/11/6
P3实验室无人化操作基础技术研究成果简介:本课题建立的基于Internet的多机器人遥操作系统,针对高危病毒医学研究实验室(P3实验室)的无人化操作应用前景,设计通过网络遥控从端机器人代替人进行危险环境中的医学研究操作,并成功地完成了相应试验的关键动作,有关专家通过现场考察后,肯定了该项技术可以实现P3实验室无人化,该成果将大大降低了P3实验室研究人员生保的成本,减少了研究人员被危险病毒感染的可能...
基于Internet的机器人控制中网络时延测试及分析
时间延迟 Internet 遥操作
2008/7/18
本文针对基于Internet的机器人控制,首先分析了Internet网络时间延迟的主要组
成及其基本特性,然后介绍了网络时延测试实验的结果及其结论,最后研究了网络时延预估
算法及其有效性.
针对目前基于Internet的遥操作机器人系统普遍完成任务简单,复杂度低,影响力有限的状况,本文将遥操作技术和Internet技术应用于具有高动态性、高协作性和高对抗性的机器人足球系统中,建立了基于Internet的遥操作机器人足球系统的体系结构,提供了该系统的软件设计方法,并针对网络通信设计了应用UDP协议进行连接和数据传输的方法.实际建立的基于Internet的3对3遥操作机器人足球系统验证了...
基于Internet多操作者多机器人的遥操作系统的研究
多机器人协作 Internet 遥操作
2008/7/18
近年来基于Internet多操作者多机器人MOMR(Multi-Operator-Multi-Robot)协作成
为许多学者关注的对象.相对于单操作者单机器人SOSR(Single-Operator-Single-Robot
)遥操作任务的单一性和局限性,MOMR在群体作业如:设备维护、建筑建造、外科手术等许
多场合具有明显的优势.对于危险或难以到达的环境,MOMR遥操作系统的控制成为一个主...
基于Internet实时机器人系统时延预测研究及算法
网络机器人 网络时延 预测算法 多尺度
2008/7/18
针对基于Internet实时机器人系统,提出了多尺度的时延预测算法,该算法是在线和实时的。基于网络结构分析了网络时延的主要组成及其时延特性。不同于传统的网络往返时延的预测,该算法预测的是能真实反映端对端数据包传递的单程时延,而且还提出了预测单向时延所需的时钟同步算法。理论分析和多点之间的网络实验验证了该算法的高效性。
具有实时性保障的INTERNET机器人控制系统设计方法
INTERNET UDP 机器人 实时控制系统
2008/7/18
本文提出了一种具有实时性、可靠性保障的INTERNET网络机器人控制系统的设计方法. 基于
该方法设计的网络实时控制系统能够满足机器人实时、高效、灵活的技术特点.该方法的核
心为基于UDP传输协议的网络数据补偿算法,通过对网络传输过程中丢失的数据进行实时在
线补偿预测,降低了网络数据的丢失对系统的影响.实验结果证明该方法的有效性、合理性
.
针对Internet多机器人系统中存在的操作指令延迟、工作效率低、协作能力差等问题,提出了多机器人神经元群网络控制模型。在学习过程中,来自不同功能区域的多类型神经元连接形成动态神经元群集,来描述各机器人的运动行为与外部条件、内部状态之间复杂的映射关系,通过对内部权值连接的评价选择,以实现最佳的多机器人运动行为协调。以互联网足球机器人系统为实验平台,给出了学习算法描述。仿真结果表明,己方机器人成功实...
一种基于用户意图建模的Internet移动机器人控制方法
网络机器人 用户意图模型 贝叶斯推断 不确定延时
2008/5/10
Internet上数据传输存在的不确定性时延,使得遥操作的网络机器人无法及时完成远程操作者期望的动作.提出一种新的方法,即对用户意图进行建模,通过移动机器人的自主性来补偿不确定时延对系统性能造成的影响.在对用户操作机器人的意图建立模型后,利用贝叶斯技术对用户意图进行渐进推断,从而使得机器人能够识别用户赋予的任务,并自主地执行该任务,而无需与用户频繁交互.这大大减少了数据传输、提高了整个控制系统的效...
基于Internet的设备远程监控技术的研究
2007/12/13
Abstract随着信息技术的不断发展,动态联盟企业的不断出现,设备远程监控技术的研究及
应用正在世界范围内兴起.文章提出了构造设备远程控制技术的的框架结构,介绍了远程监
控系统建设的关键技术,所建立的远程监测系统可用于实现对有关设备的远程信息管理、状
态监测、信息与资源共享.