
ЫбЫїНсЙћ: 1-15 ЙВВщЕНЁАХЉвЕЙЄГЬ бЇЯАЁБЯрЙиМЧТМ15Ьѕ . ВщбЏЪБМф(0.156 Уы)

СЩФўЪЁКЕЕиХЉСжбаОПЫљбЁХЩЫЎЭСБЃГжбЇПЦЧрФъПЦММШЫдБВЮМгЙњМвШ§ББЙЄГЬЙЅМсПЦММжЇГХИпМЖбааоАрбЇЯАЃЈЭМЃЉ
ЫЎЭСБЃГжбЇПЦ ЧрФъПЦММШЫдБ ЙњМвШ§ББЙЄГЬ ЙЅМсПЦММ ИпМЖбааоАр
2024/9/27
2024Фъ4дТ22Ше-25ШеЃЌЙњМвСжвЕКЭВндОжШЫЪТЫОдкФкУЩЙХГрЗхЪаОйАьСЫШ§ББЙЄГЬЙЅМсПЦММжЇГХИпМЖбааоАрЃЌСЩФўЪЁКЕЕиХЉСжбаОПЫљбЁХЩЫЎЭСБЃГжбЇПЦЧрФъПЦММШЫдБСжбєИпМЖЙЄГЬЪІЁЂЖЁКъгюИБбаОПдБВЮЛсЁЃ

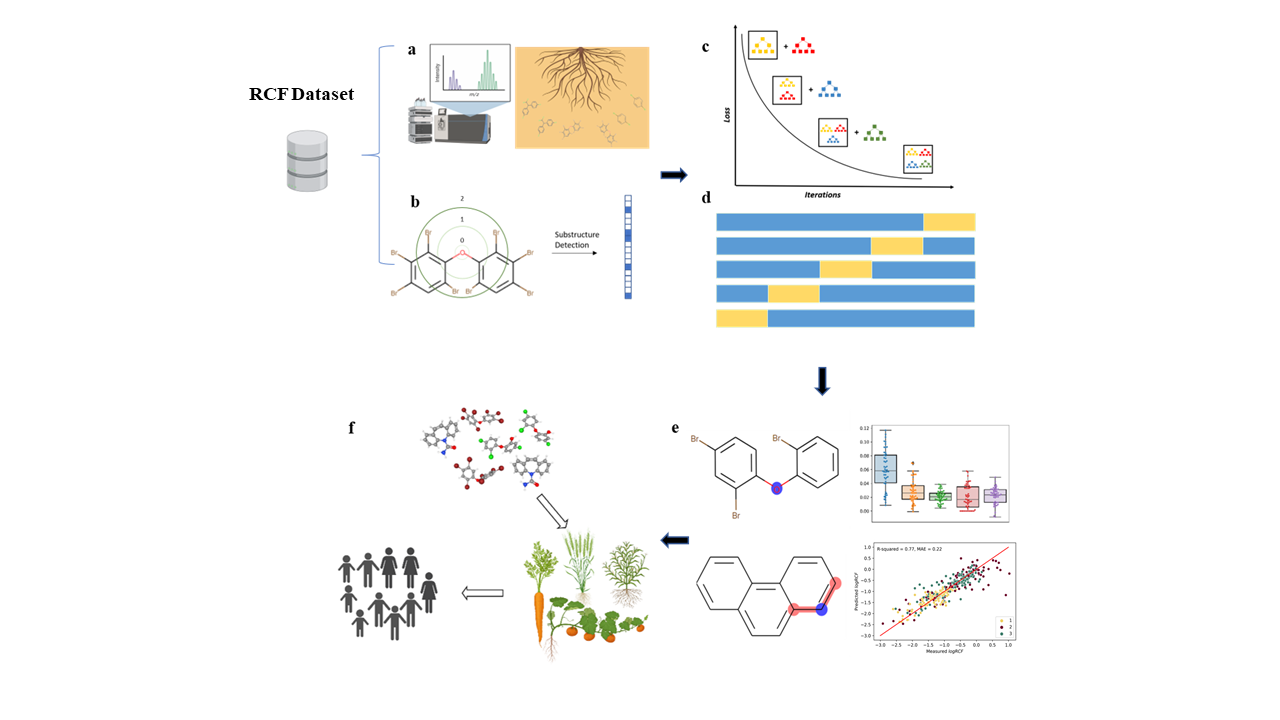
НќШеЃЌжаЙњХЉвЕПЦбЇдКХЉвЕЛЗОГгыПЩГжајЗЂеЙбаОПЫљжжжВЗЯЦњЮяЧхНрзЊЛЏгыИпжЕРћгУЭХЖгЙЙНЈСЫЛњЦїбЇЯАДѓЪ§ОнФЃаЭЃЌНвЪОСЫНеИбЩњЮяЬПВФСЯМАЦфДЂФмЬиадЕФЙЙаЇЙиЯЕЃЌЯрЙибаОПГЩЙћЗЂБэдкЁЖЛЏбЇЙЄГЬдгжОЃЈChemical Engineering JournalЃЉЁЗЩЯЁЃ

ЮЊНєзЅЪОЗЖеЙЪОжАФмЙЄзїЃЌТфЪЕНЫеЪЁЮЏЪЁСьЕМЖдНЫеХЉЛњеЙАьеЙЫЎЦНЕФЬсЩ§вЊЧѓЃЌ2023Фъ10дТ24ШеНЫеЪЁХЉЛњЪОЗЖжааФвЛааЃЌЧАЭљЮфККВЮЙл2023жаЙњЙњМЪХЉвЕЛњаЕеЙРРЛсНјааЙлФІбЇЯАЁЃБОДЮеЙЛсгЩжаЙњХЉвЕЛњаЕСїЭЈаЛсЁЂжаЙњХЉвЕЛњаЕЛЏаЛсЁЂжаЙњХЉвЕЛњаЕЙЄвЕаЛсжїАьЃЌЪЧЙњФкжЊУћХЉЛњзЈвЕеЙЛсжЎвЛЁЃ

ЩНЖЋХЉвЕЙЄГЬбЇдКзЪдДгыЛЗОГЙЄГЬбЇдКгаЛњЗЯЦњЮябЛЗРћгУНЬбЇЭХЖгИАЩНЖЋКНПебЇдКЩњЮягыЛЗОГЙЄГЬбЇдКНЛСїбЇЯАЃЈЭМЃЉ
гаЛњЗЯЦњЮя ЩНЖЋ КНПебЇдК зЪдДЛЏ
2023/10/17
ЮЊзіКУгаЛњЗЯЦњЮябЛЗРћгУНЬбЇЭХЖгЕФНЈЩшЃЌ2023Фъ8дТ11ШеЩЯЮчЃЌдкЭХЖгИКд№ШЫНРіЛЊНЬЪкЕФДјСьЯТЃЌЩНЖЋХЉвЕЙЄГЬбЇдКзЪдДгыЛЗОГЙЄГЬбЇдКИїзЈвЕИКд№ШЫдБИАЩНЖЋКНПебЇдКЩњЮягыЛЗОГЙЄГЬбЇдКПМВьбЇЯАЁЃзЪдДгыЛЗОГбЇПЦЗНЯђДјЭЗШЫЃЌБѕжнЪаЙЬЬхЗЯЮязЪдДЛЏЙЄГЬММЪѕбаОПжааФИБжїШЮРюбЇЦННЬЪкШШЧщНгД§СЫЩНЖЋХЉвЕЙЄГЬбЇдКзЪдДгыЛЗОГЙЄГЬбЇдКЗУЮЪНЛСїШЫдБЁЃ

КўББЪЁЫЎЭСБЃГжбЇЛсОйАьЁАбЇЯАЙсГЙЕГЕФЖўЪЎДѓОЋЩёаћНВБЈИцЛсєпГЄНДѓБЃЛЄгыДДаТЫЎЭСБЃГжЗЂеЙТлЬГЁБЃЈЭМЃЉ
КўББЪЁ ЫЎЭСБЃГж ЖўЪЎДѓ аћНВБЈИцЛс ГЄН ЮфКК
2023/8/14
2023Фъ3дТ30ШеЃЌКўББЪЁЫЎЭСБЃГжбЇЛсдкЮфККТЁжиейПЊСЫЁАбЇЯАЙсГЙЕГЕФЖўЪЎДѓОЋЩёаћНВБЈИцЛсєпГЄНДѓБЃЛЄгыДДаТЫЎЭСБЃГжЗЂеЙТлЬГЁБЁЃбЇЛсЮтзёалИБРэЪТГЄжїГжСЫМђЖЬЕФПЊФЛЪНЃЌСѕСвгёРэЪТГЄЮЊЛсвщжТДЧЃЌЭѕЦНеТИБРэЪТГЄжїГжСЫбЇЛсЕкЖўНьгХауГЩЙћНБАфНБЛюЖЏЃЌЭѕаЁЦНУиЪщГЄжїГжСЫЖўЪЎДѓОЋЩёаћНВБЈИцЛсЃЌаэУїЯщИБРэЪТГЄжїГжСЫЗЂеЙТлЬГВЂзіСЫЛсвщзмНсЁЃжаЙњЫЎЭСБЃГжбЇЛсГЃЮёРэЪТЁЂГЄНЮЏЫЎЭСБЃГжОжКЋЗяЯшИБОжГЄГіЯЏЛсвщВЂдкЗЂеЙТлЬГЩЯ...
ЛњЦїбЇЯАФЃаЭжБНгдЄВтХЉвЉЕШХЉвЕЮлШОЮядкжВЮяИљЯЕЕФРлЛ§ЃЈЭМЃЉ
ЛњЦїбЇЯАФЃаЭ ХЉвЉ ХЉвЕЮлШОЮя жВЮяИљЯЕ
2022/1/20
НќШеЃЌжаЙњХЉвЕПЦбЇдКжВЮяБЃЛЄбаОПЫљХЉвЉгІгУЗчЯеПижЦДДаТЭХЖгЪзДЮРћгУЛњЦїбЇЯАФЃаЭжБНгдЄВтжВЮяИљВПДгЭСШРжаЮќЪеРлЛ§ХЉвЉЕШгаЛњЮлШОЮяЕФСПЃЌНтОіСЫДЋЭГЯпадФЃаЭЮоЗЈФЃФтХЉвЉБЛжВЮяЮќЪеЕФЗЧЯпадЙиЯЕЃЌВЂНвЪОСЫгАЯьжВЮяРлЛ§ХЉвЉЕФЙиМќЛЏбЇЗжзгНсЙЙЃЌЮЊХЉВњЦЗдкВњЕиЛЗОГЛЏбЇЮлШОЕФдЄВтЬсЙЉСЫаТЕФЙЄОпКЭЪжЖЮЁЃЯрЙибаОПдкЯпЗЂБэдкЁЖЮЃЯеВФСЯдгжОЃЈJournal of Hazardous MaterialsЃЉЁЗЕШЦкПЏЩЯЁЃ

КўББЪЁЫЎЭСБЃГжбЇЛсОйАьММЪѕЗўЮёзЈМвПтзЈМвбЇЯАНЛСїбаЬжЛсЃЈЭМЃЉ
КўББЪЁЫЎЭСБЃГжбЇЛс ММЪѕЗўЮё зЈМвПт баЬжЛс
2022/6/30
дкМЭФюЁЖЫЎЭСБЃГжЗЈЁЗЪЉаа10жмФъКЭ2021ФъЁАЪРНчЫЎШеЁБЁАжаЙњЫЎжмЁБЕНРДжЎМЪЃЌ2021Фъ3дТ19ШеЃЌКўББЪЁЫЎЭСБЃГжбЇЛсдкЮфККОйАьСЫШЋЪЁММЪѕЗўЮёзЈМвПтзЈМвбЇЯАНЛСїбаЬжЛсЃЌЛсвщВЩШЁЯпЩЯКЭЯпЯТЯрНсКЯЕФаЮЪНЃЌЯпЩЯВЩгУЭјТчНЛСїЁАЬкбЖЪгЦЕЁБЦНЬЈЃЌЯпЯТВЩгУжїЛсГЁЯжГЁНЛСїЃЌ30ЖрУћзЈМвВЮМгСЫЯпЯТжїЛсГЁЛюЖЏЃЌ50ЖрУћзЈМвВЮМгСЫЯпЩЯбЇЯАНЛСїбаЬжЁЃ

ЙуЖЋЪЁХЉвЕПЦбЇдКХЉвЕЩњЮяЛљвђбаОПжааФПЦбаГЩЙћЃКЛљгкЛњаЕбЇЯАЕФжжзгжЧЛлЩњВњММЪѕгІгУгыЭЦЙуЃЈЭМЃЉ
ЙуЖЋХЉПЦдК ЛљвђжааФ ПЦбаГЩЙћ жжзг жЧЛлЩњВњММЪѕ
2023/5/11
ЙуЖЋЪЁХЉвЕПЦбЇдКХЉвЕЩњЮяЛљвђбаОПжааФжВЮяжжжЪзЪдДМјЦРбаОПЪвЭЈЙ§ЛњаЕбЇЯАКЭЮоШЫЛњВЩМЏЭМЯёЕШЯрЙиММЪѕНсКЯЃЌжТСІгкХЉзїЮяг§жжЙ§ГЬжаИїЯрЙиЛЗНкЕФЪ§ОнВЩМЏЁЂЗжЮіЁЂНЈФЃЃЌВЂгІгУЭЦЙуЃЌФПЧАвбОдкЫЎЕОЁЂгёУзЁЂИЬщйЃЈКЌаТЛсГТЦЄИЬЃЉЕШзїЮяжаПЊеЙгІгУЃЌЖдИєРыЧјЩшжУЁЂУчЦкШЅдгЁЂЬяМфЩњГЄЖЏЬЌМрВтМАдЄБЈЁЂГЩЪьЦкдЄВтЕШЯрЙиЗНУцОпгаМЋЧПЕФИЈжњЙІФмЁЃГфЗжЕФБЃжЄСЫг§жжИїЛЗНкЕФЙЄзїжЪСПЁЃФПЧАвВМЦЛЎдкДѓЖЙЁЂєјЖЙЕШзїЮяжаНјааЬНЫїЃЌШУећИіЪ§...
ЛљгкЕЭПевЃИагыЧЈвЦбЇЯАЕФЭСЕиРћгУаХЯЂПьЫйжЦЭМЗНЗЈ
ЕЭПевЃИаММЪѕ ЭСЕиРћгУаХЯЂ ЗжРржЦЭМ ВЛБфЖдЯѓЛёШЁ жЊЪЖЧЈвЦбЇЯА ЯШбщжЊЪЖ
2016/12/23
ЮЊНтОібљБОЕФЪжЙЄЛёШЁКЭГЃЙцЕФФПЪгНтвыФбвдЪЪгІФПЧАХЉвЕЭСЕизЪдДаХЯЂздЖЏЛЏЬсШЁЕФашЧѓЮЪЬтЃЌв§ШыЪБПеЪ§ОнЭкОђММЪѕЃЌдЫгУЙиСЊжЊЪЖЧЈвЦбЇЯАЛњжЦЃЌЬсГіСЫвЛжжЛљгкжЊЪЖЧЈвЦбЇЯАЕФИпЗжБцвЃИагАЯёЭСЕиРћгУаХЯЂЗжРржЦЭМЗНЗЈ(KTLC)ЁЃЪзЯШЃЌдЫгУИФНјЕФОљжЕЦЏвЦЫуЗЈЖдаТЕФД§ЗжРржЦЭМгАЯёНјааЗжИюЛёЕУгАЯёЖдЯѓЃЌШЛКѓЃЌНЋЗжИюКѓЖдЯѓЕФЪИСПБпНчгыЧАЪБЯрЭСЕиРћгУЪИСПзЈЬтЭМНјааХфзМЁЂЧЖЬзЃЌЭЈЙ§ЕўМгЗжЮіЛёШЁЕБЧАгАЯёжаЕФВЛБфЖдЯѓЃЌВЂЭЈЙ§Йт...
еыЖдXЩфЯпМьВтжаж§МўЮЂШѕШБЯнЮѓМьТЪКЭТЉМьТЪИпЕФЮЪЬтЃЌЬсГівЛжжЛљгкбЁдёадзЂвтЛњжЦКЭЩюЖШбЇЯАЬиеїЦЅХфЕФШБЯнЖЏЬЌИњзйМьВтЗНЗЈЁЃЛљгкЩфЯпЭМЯёађСа,ВЩШЁжЁФкзЂвтЧјгђМьВтЯћГ§ТЉМьЁЂжЁМфЩюЖШбЇЯАЬиеїЦЅХфИњзйХХГ§ЮѓМьЕФВпТдЁЃдкжЁФкМьВтНзЖЮЃЌЬсГіЭЈЙ§жабы-жмБпЬнЖШЫбЫїЗНЗЈФЃФтЩњЮяЪгОѕЕФжабы-жмБпВюдЫЫуЃЌИљОнЬнЖШуажЕжБНгМьВтИїПЩвЩШБЯнЧјгђЃЌЮоашЗжИюГіШБЯнБОЩэЁЃдкжЁМфИњзйНзЖЮЃЌНшМјШЫРрДѓФдЪгОѕИажЊЯЕЭГЕФЩюЖШбЇЯАВуДЮНсЙЙ...
РћгУМЋЯобЇЯАЛњФЃаЭНтвыИпТШРызгИЩШХЯТбЮМюЭСжаЯѕЫсИљРызгбЁдёЕчМЋЯьгІаХКХЃЌЯЕЭГЗжЮіСЫЦЏвЦаЃе§ЫуЗЈЁЂФмЫЙЬиМАМЋЯобЇЯАЛњФЃаЭЖдЕчМЋЗЈЯѕЬЌЕЊЃЈNO-3-NЃЉдЄВтНсЙћзМШЗадЕФгАЯьВювьЁЃНсЙћБэУїЃЌЦЏвЦаЃе§ЫуЗЈПЩУїЯдЬсИпДЋИаЦїБъЖЈЗНГЬЕФжиИДадКЭвЛжТадЃЌЯьгІаБТЪМАНиОрЕчЮЛЕФВЈЖЏЗЖЮЇЗжБ№ЫѕаЁСЫ3.67%КЭ7.25%ЃЛМЋЯобЇЯАЛњФЃаЭЕФзюгХвўКЌВуНкЕуЪ§ЮЊ14ЃЛЛљгкМЋЯобЇЯАЛњЕФЕчМЋЗЈNO-3-NжЪСПХЈЖШдЄВтФЃаЭПЩНЯКУвжжЦ...
еыЖдИДдгЖрФПБъгХЛЏЮЪЬтЃЌЬсГівЛжжЛљгкЗжНтЛњжЦКЭЗДЯђбЇЯАФЃаЭЕФЖрФПБъНјЛЏЫуЗЈЁЃИУЫуЗЈдкЛљгкЗжНтЛњжЦЕФЖрФПБъНјааЫуЗЈЕФПђМмЯТЃЌв§ШыЗДЯђбЇЯАФЃаЭЃЌИУФЃаЭОпгаНЯКУЕФОжВПбАгХФмСІЁЃдкжжШКНјЛЏЕФЙ§ГЬжаЃЌЗДЯђбЇЯАФЃаЭКЭВюЗжНјЛЏЛњжЦздЪЪгІЕФЯрЛЅХфКЯЃЌФмЙЛНЯКУЕиЦНКтЫуЗЈЕФШЋОжЫбЫїгыОжВПбАгХФмСІЁЃВЩгУЙњМЪЙЋШЯЕФОпгаИДдгPareto SetЕФLZ09ЯЕСаВтЪдЮЪЬтНјааЪЕбщбщжЄЃЌВЂгыMOEA/DЁЊDEЁЂGDE3ЁЂNSGAЁЊ...
жэШтбеЩЋЗжМЖЪЧШтЦЗЦЗжЪЮоЫ№МьВтЕФживЊФкШнЁЃИУЮФЭЈЙ§ЖджэШтВЪЩЋЪ§зжЭМЯёбеЩЋЙцТЩЕФЗжЮіЃЌНсКЯжэШтКьЃЈRЃЉЁЂТЬЃЈGЃЉЁЂРЖЃЈBЃЉбеЩЋЗжСПМАЦфССЖШКЭБЅКЭЖШжЕЃЌЙЙНЈСЫвЛИіаТЕФбеЩЋЮЌЖШЁЃНЋВЩМЏЕФ1070ЗнжэШтЭМЯёбљБОНјаазЈМвЗжМЖКЭБъМЧКѓЃЌИјГіСЫжэШтбеЩЋЕФЬиеїБэЪОЃЌВЂРћгУжЇГжЯђСПЛњЃЈSVMЃЉНјааСЫбеЩЋЗжМЖЁЃЪдбщНсЙћБэУїЃЌЫцзХбЕСЗМЏбљБОЪ§ЕФдіМгЃЌЗжМЖзМШЗТЪгаЫљЬсИпЁЃЕБНЋЫљгабљБОзїЮЊбЕСЗМЏЪБЃЌЗжМЖзМШЗТЪИпДя96.5%...
ЙпадЕМКНздЖЏв§ЕМГЕДХЖЄаЃе§ТЗОЖЕќДњбЇЯАЗНЗЈЃЈPath Iterative Learning of Inertial Guided AGV with Magnets CorrectionЃЉ
здЖЏв§ЕМГЕ ТЗОЖИњзй ЙпадЕМв§
2009/8/11
еыЖдБрТыЦїКЭЭгТнвЧзщГЩЕФAGVЕМКНЯЕЭГЕФЛ§РлЮѓВюЃЌдкТЗОЖЩЯУПИєвЛЖЮОрРыЩшжУвЛЖдДХЖЄЃЌгЩДХеЄГпМьВтНјааОјЖдЮЛзЫаЃе§ЁЃГЕМфЛЗОГеЯАЪЙЕУДХЖЄЕФОјЖдЮЛжУФбвдОЋШЗВтСПЃЌИјAGVЕФЪЕМЪгІгУЕїЪдДјРДВЛБуЁЃЯШВЩгУЪОНЬЗНЗЈгЩAGVВтСПВЂМЧТМДХЖЄЕФЮЛжУЃЌВЂдквдКѓЕФжиИДдЫЖЏжаВЩгУЕќДњбЇЯАЗНЗЈВЛЖЯИќаТОжВПТЗОЖЖЮЕФФПБъжЕЃЌЪЙAGVИќФмОЋШЗЕиЭЈЙ§ДХЖЄЃЌДгЖјБЃжЄAGVИњзйТЗОЖЕФОЋЖШЁЃетжжЗНЗЈАВзАДХЖЄПьНнЃЌAGVЯЕЭГЙцЛЎЕїЪдЗНБу...
ИУЮФЬсГіСЫЛљгкзЈМвжЊЪЖЕФЕќДњбЇЯАПижЦЗНЗЈгІгУгкЛњаЕбЙСІЛњЛЌПщааГЬжаШЮвтЮЛжУЕФЭЃжЙЁЃИУПижЦЗНЗЈБШдгаЕФДчЖЏЕїНкЛЌПщЮЛжУЗЈВЛНіаЇТЪИпЃЌЖјЧвЕїНкОЋЖШвВИќКУЃЌЭЌЪБНЈСЂСЫЯргІаТЕФЛњаЕбЙСІЛњМЦЫуЛњПижЦЯЕЭГЁЃЭЈЙ§дкJH23-63аЭЛњаЕбЙСІЛњЩЯЕФДѓСПЪдбщБэУїЃЌвдИУЮФЬсГіЕФЗНЗЈЮЊКЫаФЕФМЦЫуЛњПижЦЖдгкЛњаЕбЙСІЛњЛЌПщЕФШЋааГЬЮЛжУПижЦЪЎЗжгааЇЃЌЖјЧвОпгаОЋЖШИпЁЂНкЪЁФмдДЕФгХЕуЁЃ
жаЙњбаОПЩњНЬг§ХХааАё-Ьѕ
- е§дкМгди...
жаЙњбЇЪѕЦкПЏХХааАё-Ьѕ
- е§дкМгди...
ЪРНчДѓбЇПЦбаЛњЙЙХХааАё-Ьѕ
- е§дкМгди...
жаЙњДѓбЇХХааАё-Ьѕ
- е§дкМгди...
ШЫЁЁЮя-ЦЊ
- е§дкМгди...
ПЮЁЁМў-ЦЊ
- е§дкМгди...
ЪгЬ§зЪСЯ-ЦЊ
- е§дкМгди...
баеазЪСЯ -ЦЊ
- е§дкМгди...
жЊЪЖвЊЮХ-ЦЊ
- е§дкМгди...
ЙњМЪЖЏЬЌ-ЦЊ
- е§дкМгди...
ЛсвщжааФ-ЦЊ
- е§дкМгди...
бЇЪѕжИФЯ-ЦЊ
- е§дкМгди...
бЇЪѕеОЕу-ЦЊ
- е§дкМгди...