
搜索结果: 1-15 共查到“控制科学与技术 通讯”相关记录146条 . 查询时间(0.125 秒)

长安大学信息工程学院赵祥模教授团队研究成果应邀在 《CCF通讯》发表――基于数字孪生的自动驾驶整车在环仿真测试(图)
长安大学信息工程学院 赵祥模 CCF通讯 中国计算机学会 数字孪生 自动驾驶 在环仿真测试
2022/5/23
应中国计算机学会(CCF)-虚拟现实与可视化专委会(TCVRV)与《中国计算机学会通讯》编辑部的邀请,我院赵祥模教授团队的研究成果《基于数字孪生的自动驾驶整车在环仿真测试》在中国计算机学会旗舰会刊《CCF通讯》2021年第7期发表。文章详细介绍了赵祥模教授团队在自动驾驶虚拟测试高保真场景构建、自动驾驶感知数据的逆向生成、多车交互及动态交通流建模等领域的最新研究成果。

日前,我院杨洪教授课题组在光控软体机器人研究领域取得重要进展,科研团队报道了一种利用可见和红外三个波段的光去操控软体机器人运动方向的便捷调制策略。该研究成果于近日发表在国际顶级期刊《自然通讯》杂志上。

近日,我校王宏志教授课题组在智能变色―致动一体化软体机器人领域取得新进展,相关研究成果以《晶格收缩触发的协同电致变色致动器》(“Lattice-Contraction Triggered Synchronous Electrochromic Actuator”, DOI:10.1038/s41467-018-07241-7)为题发表于国际知名学术期刊《自然》(Nature)子刊《自然•...
第十四届全国人机语音通讯学术会议(National Conference on Man-Machine Speech Communication)
人机语音通讯技术 语音 通讯 声学 听觉 音乐声学
2017/2/14
人机语音通讯技术的研究一直是国内外关注的热点。全国人机语音通讯学术会议(NCMMSC)由中国中文信息学会语音信息专业委员会主办,中国声学学会语言、听觉和音乐声学分会,中国语言学会语音学分会联合协办,是这一领域广大专家、学者和科研工作者交流最新研究成果,促进该领域研究和开发工作不断进步的重要舞台。该系列会议自1990年开创以来已成功召开了十三届。
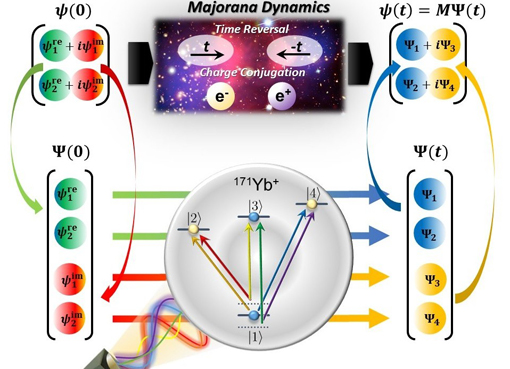
清华大学交叉信息研究院量子信息中心金奇奂研究组在《自然・通讯》发表论文 首次在离子阱系统中实现嵌入式量子模拟器(图)
清华大学交叉信息研究院量子信息中心 金奇奂研究组 自然・通讯 离子阱系统 嵌入式量子模拟器
2015/8/10
清华大学交叉信息研究院量子信息中心金奇奂副教授所带领的离子阱研究小组近日首次在离子阱系统中实现了嵌入式量子模拟器。该项研究成果《嵌入式量子模拟器中的时间反演和电荷共轭》(Time Reversal and Charge Conjugation in an Embedding Quantum Simulator)于2015年8月4日发表在《自然・通讯》(Nature Communications)期...
基于Modbus同步通讯的多电机同轴控制系统
Modbus通讯协议 永磁电机 泥浆泵 PLC 同轴驱动
2014/6/19
本文讨论了多电机同轴驱动的控制思想,基于Modbus通讯协议和PLC,实现了两台同轴连接电机的同步控制,直接驱动一台泥浆泵工作,较之以往更加节能、安全稳定。以双电机同轴泥浆泵电控系统为例,分析了其双电机同轴驱动的优越性,阐述其组成和基本原理,Modbus-RTU通信协议的特点,如何利用西门子S7-226PLC与伟肯NXP变频器进行双机同步通信,通过实验证明系统的同步性和节能性。
神九飞天:树立测控通讯系统新的里程碑
测控通讯系统 钱卫平 考核
2022/3/31
载人航天工程测控通信系统总设计师钱卫平2012年6月17日接受记者采访时说:“神九飞天,无论是对载人航天工程还是对测控通信系统来说,都是一个新的里程碑。”。钱卫平介绍说,神九实施和建立的是有人参与和自动相结合的飞船与目标飞行器对接模式,这种模式将是未来长久使用的模式。“人与机器的最大不同,是人能够依靠自己的智力去判断复杂状况和情形,这是任何智能机器都做不到的。”他说,“人的参与,可以避免机器处置发...
基于局部传感和通讯的多机器人运动规划框架
多机器人系统 运动规划 局部传感和通讯
2009/6/25
在多机器人系统的研究中,基于局部传感和通讯的系统需要特殊的设计。针对许多任务都需要的运动规划能力,一个基于局部传感和通讯的完整框架在文中得到了描述和模拟实现。该框架包括环境模型、一个分布式架构、动态网络通讯模块和规划、协调算法;动态网络通讯模块为协调提供了良好基础,环境模型和规划、协调算法的设计都考虑到了局部传感和通讯的特殊性;对于框架的验证,提出了一个基于黑板架构的仿真模型并做出了实现。
MCP型系列智能防盗通讯机
遥控 防盗通讯机 人工智能 自动报警
2009/3/2
MCP型系列智能防盗通讯机由单片计算机、通讯、语音等电话技术构成,可充分利用电话网、无线寻呼网实现报警信息的远距离传送和电器设备、家用电器的异地遥控。该机可与红外防盗传感器、煤气报警器、门磁开关、紧急报警按钮等相连接构成一个防盗系统,具有功能多、操作方便的特点。主要特点、性能:MCP-2000型-智能拨号、单向通讯。四路传感器输入(第一路有延时报警功能)、一路紧急报警输入,每个输入口采用数字滤波、...
通讯受限不确定网络化控制系统鲁棒H∞滤波
自动控制技术 网络控制系统 鲁棒滤波 切换系统
2009/2/19
针对一类通讯受限的不确定网络控制系统,结合切换Lyapunov函数和参数依赖Lyapunov函数方法,提出了一种基于模态切换构造的鲁棒H∞滤波器设计方法。通过引入两个附加的松弛矩阵使Lyapunov矩阵和系统矩阵分离,得到了一个新的具有更低保守性的鲁棒H∞性能判据,并基于该判据给出了系统的鲁棒H∞滤波器的设计方法。设计的滤波器不但保证闭环系统的二次稳定性,同时使误差系统的H∞范数小于一个给定的衰减...
基于移动通讯网络和机器人群的分布式主动传感系统
移动通讯网络 机器人群 传感系统
2008/12/18
本课题实施中采用理论研究与实际相结合的技术路线,边进行理论和技术的研究,边进行系统设计与建立。每一个理论与技术研究在系统平台上进行验证。研究成功的系统的功能和指标,充分体现了我们采用的关键技术和技术路线的科学性。同时,课题研究在下面几个方面体现出了所采用关键技术和技术路线的先进性和创新性:(1) 建立了利用移动通信网和自主网构建分布式主动式传感器网络系统的方法,实现了空中和地面移动机器人群的网络化...
To mitigate the loop delay in distributed wireless networks, a predictive power and rate control scheme is proposed for the system model that also accounts for the congestion levels and input delay ...
基于移动通讯网络和机器人的分布式主动传感系统
机器人 移动通讯网络 主动传感系统 分布式传感系统
2008/9/28
该课题实施中采用理论研究与实际相结合的技术路线,边进行理论和技术的研究,边进行系统设计与建立。将每一个理论与技术研究在系统平台上进行验证。研究成功的系统的功能和指标,充分体现了采用的关键技术和技术路线的科学性。可以应用于环境监测,社区的保安和室内外的安全监视。可以作为分布式侦察系统侦察和监视敌情。此外,无线通讯和GPS的集成技术作为关键技术可以应用到多种信息系统和通讯系统。