
�������: 1-15 ���鵽����ѧ Underwater Vehicle����ؼ�¼15�� . ��ѯʱ��(0.062 ��)

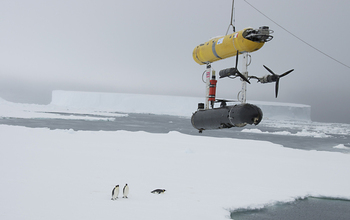
Robotic underwater vehicle snaps first images of seafloor beneath Antarctica's Thwaites Glacier��ͼ��
Robotic underwater vehicle snaps first images seafloor beneath Antarctica Thwaites Glacier
2020/2/20
During the first study of the ocean floor beneath Antarctica��s Thwaites Glacier, scientists took images of the glacier's foundations. Thwaites now accounts for about 4% of global sea level rise, and r...
Mid-Ocean Ridge Exploration with an Autonomous Underwater Vehicle
Autonomous Underwater Vehicle Ocean
2015/7/22
Human-occupied submersibles, towed vehicles, and tethered remotely operated vehicles (ROVs) have traditionally been used to study the deep seafloor. In recent years, however, autonomous underwater veh...
Autonomous Underwater Vehicle exploration of the Ocean cavity Beneath an Antarctic ice Shelf
Underwater Vehicle Ocean
2015/7/15
in recent years, mass loss from the Antarctic
ice Sheet has contributed nearly 0.5 mm yr�C1
to global mean sea level rise, about one-sixth of
the current rate (church et al., 2011). Around
...
Unmanned underwater vehicle provides first 3-D images of underside of Antarctic sea ice��ͼ��
Antarctic sea ice 3-D images
2014/12/1
A video news release and b-roll are available by contacting Dena Headlee, (703) 292-7739 / dheadlee@nsf.gov
A National Science Foundation (NSF)-funded research team has successfully tested an autonom...
Framed-Quadtree Path Planning for an Underwater Vehicle with the Task of Tracking a Moving Target
regular grid framed quadtree data structure algorithm efficiency
2011/9/9
An autonomous underwater vehicle (AUV) must use an algorithm to plan its path to distant, mobile offshore objects. Because of the uneven distribution of obstacles in the real world, the efficiency of ...
H�� Robust Fault-Tolerant Controller Design for an Autonomous Underwater Vehicle��s Navigation Control System
AUV navigation control robust H�� fault-tolerant control gain variations LMI
2011/9/9
In order to improve the security and reliability for autonomous underwater vehicle (AUV) navigation, an H�� robust fault-tolerant controller was designed after analyzing variations in state-feedback ga...
High-latitude oceanography using the Autosub autonomous underwater vehicle
High-latitude oceanography autonomous underwater vehicle
2014/4/18
A combination of measurements from Autosub, an autonomous underwater vehicle, and ship-based
instruments are used to describe the oceanographic conditions beneath Fimbul Ice Shelf, Antarctica. The da...
Mapping the spatial variability of plankton metabolism using nitrate and oxygen sensors on an autonomous underwater vehicle
Mapping the spatial metabolism using nitrate
2014/4/18
It is now possible to make highly resolved vertical (,1 m) and horizontal (3 m at constant depth and ,400 m
when undulating from surface to 100 m) measurements of nitrate concentration in the upper o...
Simulating an underwater vehicle self-correcting guidance system with Simulink
Simulink self-correcting ahead angle arithmetic vehicle acoustic homing system modularization
2011/9/14
Underwater vehicles have already adopted self-correcting directional guidance algorithms based on multi-beam self-guidance systems, not waiting for research to determine the most effective algorithms....
High-latitude oceanography using the Autosub autonomous underwater vehicle
High-latitude oceanography Autosub autonomous underwater vehicle
2014/5/16
A combination of measurements from Autosub, an autonomous underwater vehicle, and ship-based instruments are used to describe the oceanographic conditions beneath Fimbul Ice Shelf, Antarctica. The dat...
Ice-ocean turbulent exchange in the Arctic summer measured by an autonomous underwater vehicle
Ice-ocean turbulent exchange Arctic summer measured autonomous underwater vehicle
2014/5/16
The first-ever observed horizontal profiles of summertime ice-ocean boundary layer fluxes were obtained using vertical water velocity, temperature, and salinity collected by an Autonomous Underwater V...
Mapping bathymetric and hydrographic features of Glover’s Reef, Belize, with a REMUS autonomous underwater vehicle
Mapping bathymetric hydrographic features Glover’ s Reef, Belize REMUS autonomous underwater vehicle
2014/5/16
We used an autonomous underwater vehicle (AUV) to survey bathymetry and water mass properties at Glover’s Reef atoll in Belize as part of a multidisciplinary study of population connectivity of N...
Mapping the spatial variability of plankton metabolism using nitrate and oxygen sensors on an autonomous underwater vehicle
Mapping the spatial variability plankton metabolism using nitrate oxygen sensors autonomous underwater vehicle
2014/5/16
It is now possible to make highly resolved vertical (<1 m) and horizontal (3 m at constant depth and ~400 m when undulating from surface to 100 m) measurements of nitrate concentration in the upper oc...
Mapping bathymetric and hydrographic features of Glover��s Reef, Belize, with a REMUS autonomous underwater vehicle
Mapping bathymetric hydrographic features
2014/4/18
We used an autonomous underwater vehicle (AUV) to survey bathymetry and water mass properties at
Glover��s Reef atoll in Belize as part of a multidisciplinary study of population connectivity of Nassa...
Ice�Cocean turbulent exchange in the Arctic summer measured by an autonomous underwater vehicle
Ice�Cocean turbulent exchange Arctic summer measured
2014/4/18
The first-ever observed horizontal profiles of summertime ice�Cocean boundary layer fluxes were obtained using
vertical water velocity, temperature, and salinity collected by an Autonomous Underwater ...
�й��о����������а�-��
- ���ڼ���...
�й�ѧ���ڿ����а�-��
- ���ڼ���...
�����ѧ���л������а�-��
- ���ڼ���...
�й���ѧ���а�-��
- ���ڼ���...
�ˡ���-ƪ
- ���ڼ���...
�Ρ���-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
�������� -ƪ
- ���ڼ���...
֪ʶҪ��-ƪ
- ���ڼ���...
���ʶ�̬-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
ѧ��ָ��-ƪ
- ���ڼ���...
ѧ��վ��-ƪ
- ���ڼ���...